Labore
Die Fakultät Elektrotechnik und Wirtschaftsingenieurwesen verfügt über mehr als 20 hochmodern ausgestattete Labore. Diese werden von unseren Studierenden in Laborpraktika sowie für Forschungsthemen genutzt.

Automatisierungstechnik
Aktuelle Steuerungstechnik und Modelle von Industrieanlagen für Praxisversuche im Bereich der Automatisierungstechnik

Bioanalytik und Biosensorik
Nass-chemische Laborarbeitsplätze mit umfassender bioanalytischer sowie biosensorischer Ausstattung für aktuelle Fragestellungen der in-vitro Diagnostik und klinischen Chemie

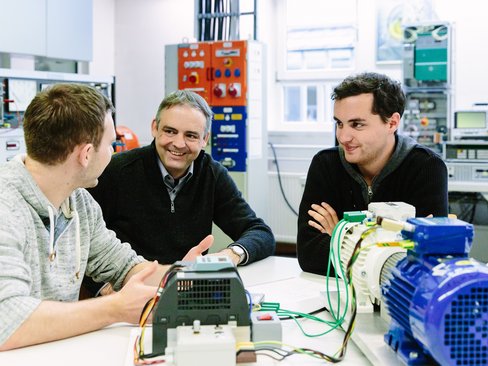
Elektrische Antriebe und Maschinen
Maschinensätze, Prüfstände und Messtechnik zum Kennenlernen und Ausprobieren der wichtigsten Grundtypen elektrischer Maschinen

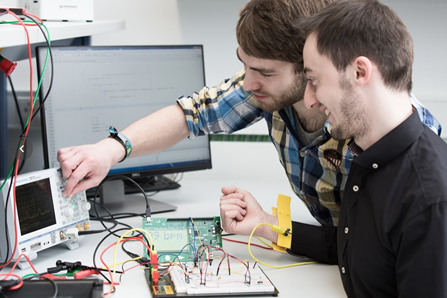
Elektronische Bauelemente und elektrische Messtechnik
Messung der Kennlinien und des Schaltverhaltens von Halbleiterbauelementen.
Anwendung von grundlegenden und fortgeschrittenen Methoden der elektrischen Messtechnik.

Elektronische Hybridschaltungen
Herstellung elektronischer Schaltungen und Bauelemente sowie gedruckter elektronischer Schaltungen und Funktionselemente auf biegsamen Kunststoff-Substraten

Embedded Systems / Bussysteme
Untersuchen von Bussystemen im Automobil und Umsetzen von Projekten zu eingebetteten autonomen Systemen

Energiewirtschaft und -technik
Angewandte Technologien in der Energietechnik und deren gängige Messmethoden
Grundlagen der Elektrotechnik
Vermittlung von Messprinzipien und Umgang mit Standardwerkzeugen mithilfe kleiner elektrischer Schaltungen
Grundlagen Elektronik, Mess- und Regelungstechnik
Grundausbildung von Studierenden der auf Elektrotechnik basierenden Studiengänge
Industrielle Bildverarbeitung
Neueste Technologien zum Thema Machine Vision / Automatische Optische Inspektion (AOI) - ausgestattet mit Objektiven, Filtern, Kameras, Beleuchtungskörpern und Kalibriernormalen sowie Bildverarbeitungs-Software

Informationstechnik Labor (IT Lab)
Demonstration und Analyse aller wichtigen Konzepte und Protokolle moderner Kommunikation in vernetzten Systemen

Kommunikationstechnik
Versuche und Projekte im Bereich Telekommunikation, Hochfrequenztechnik und digitaler Signalverarbeitung
Leistungselektronik
Aufbau, Vermessung und Verständnis für leistungselektronische Schaltungen
Medizinische Gerätetechnik
Praxisbezogene Ausbildung zu den Grundlagen medizinischer Gerätetechnik
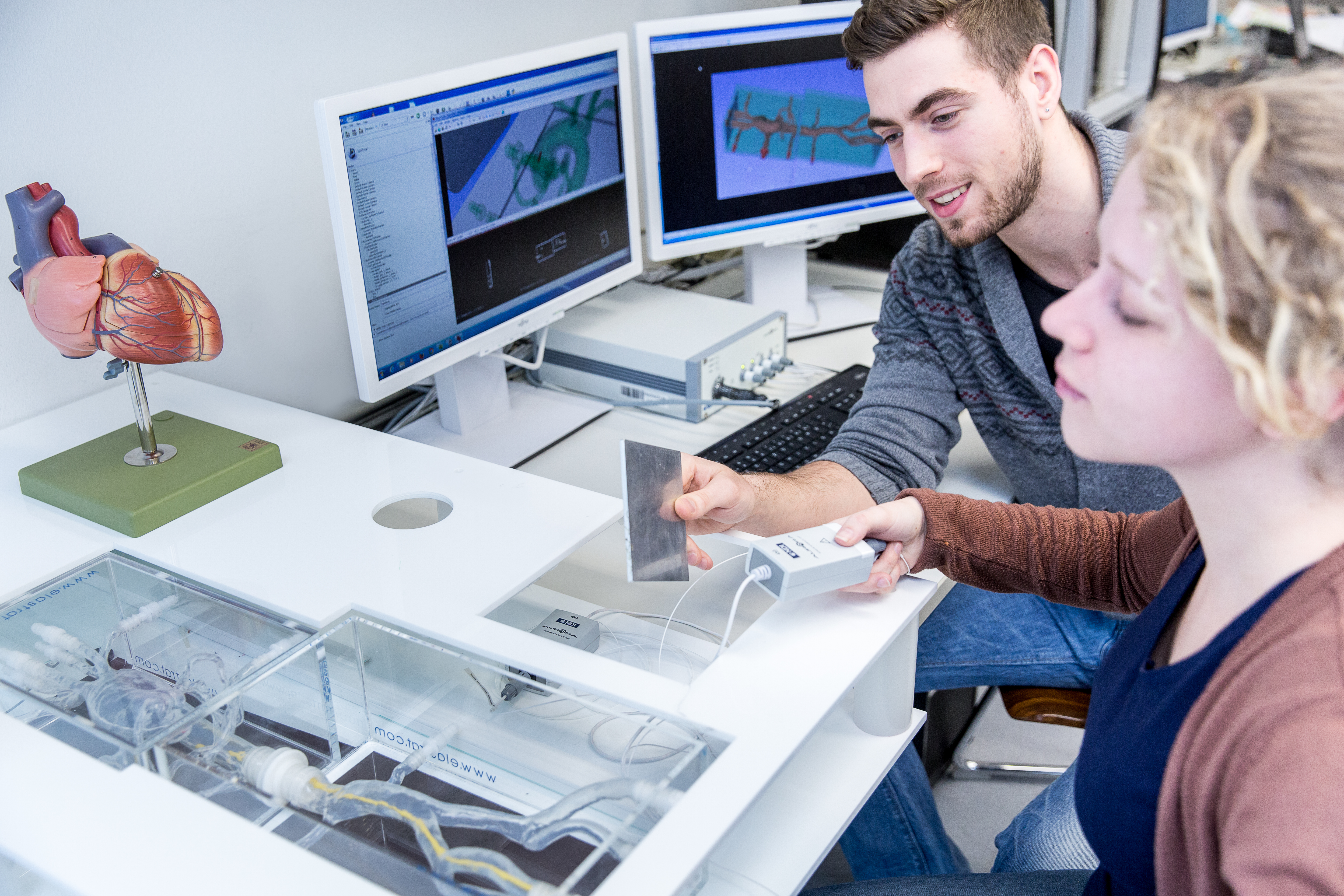
Medizintechnik
Medizintechnische Geräte für diagnostische und therapeutische Anwendungen mit Schwerpunkt auf bildgebende und minimalinvasive Verfahren

Mikrocomputertechnik
Lösen von praxisbezogenen Aufgabenstellungen mit Mikrocomputersystemen

Prozessanalytik
In userem Labor werden verschiedene Fachgebiete miteinander verbunden: Prozessoptimierung, Datenanalyse, Qualitätsmanagement und Industrie 4.0.
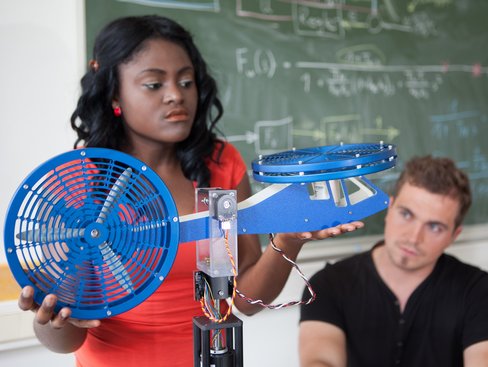
Regelungstechnik
Entwurf, Aufbau und Test von Regelungen mit verschiedenen Versuchsaufbauten

Robotik
Praxisnahe Vermittlung der Grundlagen der Manipulatortechnik und weiterführender Aspekte der Robotik

Schaltungstechnik
Schaltungen dimensionieren, aufbauen und vermessen. Bauelemente im Betrieb untersuchen.
Sensorik
Kennenlernen verschiedenster Aspekte der aktuellen Sensortechnologie zur Erfassung physikalischer Größen